▣ 연구 배경
주법을 연구하고 체화시키는 과정에서 문제가 발생했다. 어느 순간 주법을 무한정 다양화시키는 것으로 목적이 변질되었다. 종류만 많아질 뿐 나의 라이딩 스타일 스펙트럼이 넓어지진 않는다.
어떤 일이건 진행과정에서 퇴적물이 쌓여 복잡도가 증가하기 마련이다. 이럴 경우 주기적으로 리팩토링 해줘야 한다. 바탕화면 정리, 디스크 조각모음, 안쓰는 책 버리기 같은거.
미분 후 경우의 수 조합 방법론을 적용한다. 어떤 이는 이런 나를 보고 분류를 하지 않고선 못배기는 분류불안에 빠졌다고 말했고, 어떤 이는 이런 나의 모습에 진절머리가 난다며 분류병자라고 욕했다. 어쩌나. 이게 나인 걸. MECE는 나의 삶인걸.
▣ 주법 해체분석 개요
주법에 영향을 미치는 주요 속성을 계열로 삼고, 발생할 수 있는 모든 경우의 수를 조합한다.
자전거 위에서 구현가능한 페달링은 무궁무진하지 않다. 안장에 골반의 위치가 속박되는 시팅일 경우 더욱 제한적이다.
밟땡, 밀땡은 가능하지만 밟밀은 불가능하다. 밟거나 밀거나 둘 중 하나다. 크랭크를 회전시키는 역할을 밀어서 수행할지, 밟아서 수행할지는 선택의 문제다. 골반의 위치와 주동근의 차이에 따라서 달라지는 것이기 때문이다. 미는 것은 둔근 위주 밟는 것은 대퇴근 위주라고 보면 된다.
시팅에서는 힘의 전달이 안장을 중심으로 전해진다. 핸들 그립의 위치나 상체의 각도, 움츠린 정도는 댄싱에 비해 상대적으로 덜 중요하다. 에어로 자세를 취하는 것이 아니라면 각 주법에 자연스러운 상체 각도와 핸들의 위치를 취하면 된다. 시팅의 상체 포지션까지 의식할 필요는 없다. 척추 모양은 사람마다 다 다르다. 그러니 제 몸이 알아서 찾아낼 것이다.
반면 댄싱은 핸들 그립의 위치와 상체의 기립정도, 무게중심이 중요하다. 골반이 안장으로부터 해방되기 때문에 고려해야 하는 변수들이 많아진다. 변주를 통한 확장응용이 가능하다. 경우의 수가 너무 많아져 연구 난이도는 높아진다. 댄싱은 무궁무진한 가능성을 가진 장기연구과제이므로 오늘은 시팅에 관한 얘기만 한다.
▣ 미분, 연산, 출력, 정리
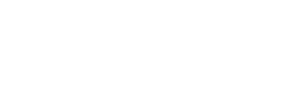
시팅의 경우의 수 : 독립행위 9개에 복합행위 6개 총 15가지 나온다. (3*3)+(2*3)=9+6=15
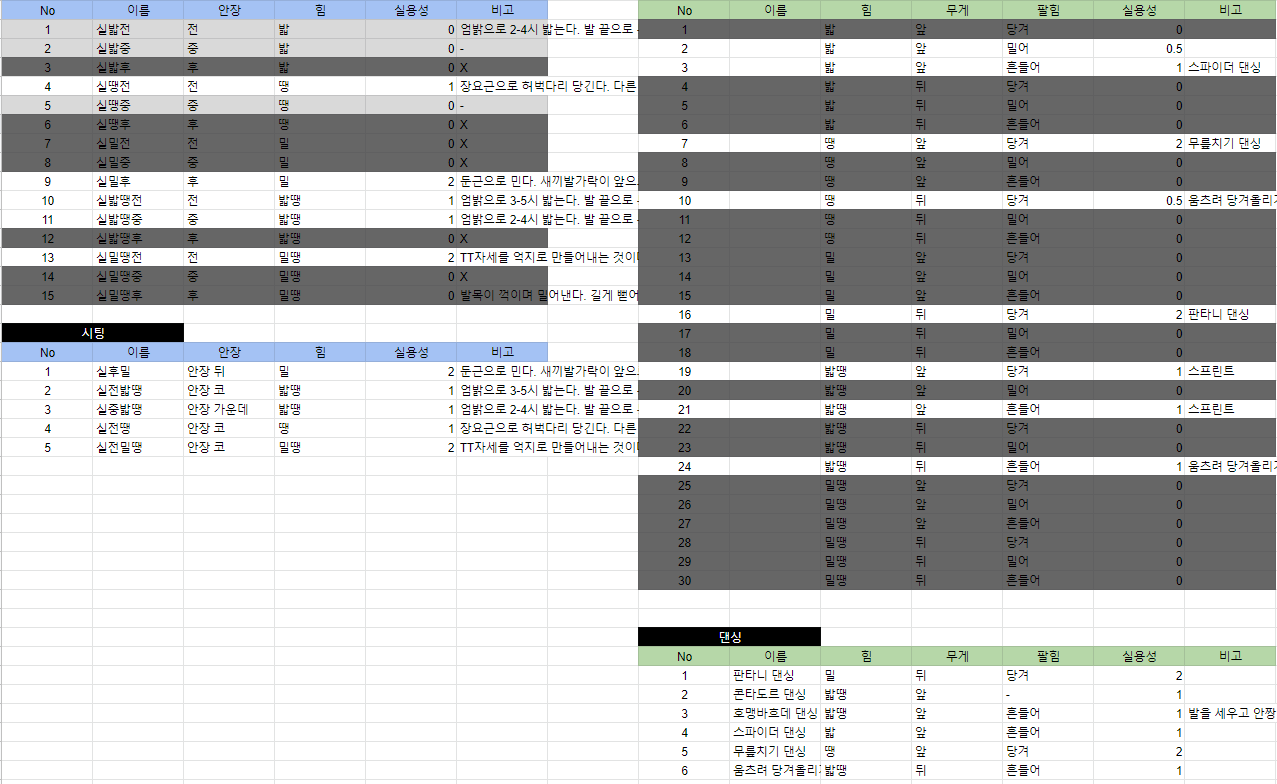
댄싱의 경우의 수 : 독립행위 18개에 복합행위 12개 총 30가지 나온다. (3*2*3)+(2*2*3)=18+12=30
상체기립의 정도와 그립의 위치까지 고려한다면 경우의 수는 (3*2*2*2*3)+(2*2*2*2*3)=72+48=120가지가 되어 너무 어려우므로 두 속성은 제외한다.
경우의 수가 나온다고 주법이 되는 것은 아니다. 구현이 불가능한 주법도 있고, 활용효율이 떨어지는 주법도 있다. 제거한다.
▣ 연구 결과
본 연구에 따르면 세상에 존재할 수 있는 시팅주법은 5가지 밖에 없다.
나는 구현할 수 있는 시팅이 7가지라고 생각해왔지만, 실제로는 4가지만 쓰고 있었다. 결국 같은 주법에 이름만 다르게 붙였던 것.
본 연구에 따르면 댄싱주법은 6가지 밖에 없다.
네이밍이 입에 잘 붙는 형태는 아니지만 코드화 해두어서 정보가 함축적이다. ex) 싵전밀땡 : 시트의 앞부분에 앉아 밀고 당기는 주법이란 뜻이다.
▣ 실전 적용 후기 (일단 오늘은 시팅만)
싵후밀 : 둔근으로 민다. 새끼발가락이 앞으로 향하도록 힘주면 신체와 머신은 리듬감있게 비틀어진다. 12시-3시까지 민다. 라이더는 느낌상 수평으로 앞으로 미는 것 같은 착각이 들 것이다. 미는 발 쪽의 후드를 힘껏 잡아 당겨야 후면코어가 골반을 통해 힘을 전달할 수 있도록 균형을 잡아준다. 또는 바탑을 주먹 바깥쪽에 힘을 주어 잡고 팔꿈치를 약간 굽혀 흉곽을 넓히는 것도 방법이다. 프룸의 업힐 그립이다.
싵중밟땡 : 엄밝으로 2-4시 밟는다. 발 끝으로 통통 튀듯이. 반대편 발은 보조하듯 7-11시 당긴다.
싵전밟땡 : 엄밝으로 3-5시 밟는다. 발 끝으로 통통 튀듯이. 스트로크를 짧게 치는 것이 효율적이다. 반대편 발은 보조하듯 8-12시 당긴다. 안장 위치만 조금 당기면 각도조절은 알아서 다 된다.
싵전땡 : 장요근으로 허벅다리 당긴다. 보조적으로 활용하는 것이 일반적이다. 독립적으로 사용해 다른 주동근들을 모두 쉬게 할 수도 있는데, 파워가 약하고 장기지속이 불가능하므로 스트로크 20번 이내에 다른 주법으로 교대해주어야 한다.
싵전밀밟땡 : 상체를 최대한 앞으로 내밀고 숙여 TT자세를 억지로 만들어내낸다. 내전근 주법과 안장위치가 같지만 상체의 각도에서 차이가 생긴다. 둔근도 쓰고 햄스트링도 쓸 수 있어 폭발적인 파워를 낼 수 있다. 지오메트리가 이 자세에 최적화되어 있지 않기 때문에 둔근을 쓰려면 발목이 꺽인 상태로 눌러야 한다. 무게중심이 앞으로 쏠려 있고 안장의 좁은 부위에 골반을 걸어야 하므로 노면이 좋지 않은 상태에선 위험할 수 있다.
▣ 싵전밀밟땡 주법 심층분석
둔근을 활용해 다리를 펼치면서 햄스트링으로 당기는 모션도 동시에 취할 수 있다. 밀어내는 데에 최적화된 포지션은 아니지만 더블 스트로크가 동시에 이뤄지기 때문에 단일 근육에 걸리는 부담이 줄어들고, 결과적으로 더 적은 힘으로 스트로크한다는 느낌이지만 실제로는 더 큰 파워를 낼 수 있다.
싵전밀밟땡을 4월 9일 북악 다녀오는 길에 우연찮게 구현한 적이 있다. 그 당시엔 내전근으로 빠르게 굴린답시고 안장의 앞에 앉아서 에어로 자세를 취했던 것인데, 내전근 페달링으로 굴린다는 느낌과는 뭔가 달랐다. 잘 나가길래 6키로 정도를 그 상태로 밟았는데 나중에 보니 그 구간 동안 심박이 210이 찍혀 있었다.
높은 심박은 동시에 활용한 근육의 양이 많았다는 것이다. 밟는 근육인 대퇴부는 보조적으로 지원되지만 밀밟땡이 어느정도 가능한 주법이다. 대미지를 큰 근육들이 골고루 분담하기 때문에 심박과 심폐의 능력을 끌어쓸 수 있다. 결과적으로 자세의 변화없이도 장기간 지속시킬 수 있다.
이 자세에선 상사점이 1시 하사점이 7시가 된다.
싵후밀을 주주법으로 쓰면 근전환을 자주 해줘야 한다. 안장 뒤에 앉았을 때는 하사점까지 내려갔을 때의 다리가 너무 펴져있는 상태라 땡기는 모션이 비효율적이며 파워를 내지도 못한다. 또 단일 스트로크를 좌우가 번갈아서 반복할 뿐이다. 이 경우 밀어내는 둔근에만 피로가 축적되기 때문에 근전환을 자주 해주어야 한다. 싵전밀밟땡만으로 지속적으로 조질지, 싵후밀을 주주법으로 사용하되 근전환으로 풀어주며 조질지는 선택의 문제다.
▣ 연구 이후
싵전밀밟땡 자세가 더 잘 나올 수 있도록 안장코를 5mm정도만 높이겠다.
주법들의 전환 순서를 묶어서 묶음동작화 시켜 숙달해야 한다.
하지만 그 숙달 과정은 이와 같은 이론적 접근방법을 적용하는 것은 좋지 않을 것이다. 주법들을 조합하는 것 또한 5! 또는 6! 또는 11!의 조합갯수가 발생한다. 39,916,800가지의 조합방식이 존재한다. 전환 순서는 몸이 알아서 찾아내도록 하자. 이제 몸의 피드백에 귀를 기울여라.